Paper Video
01
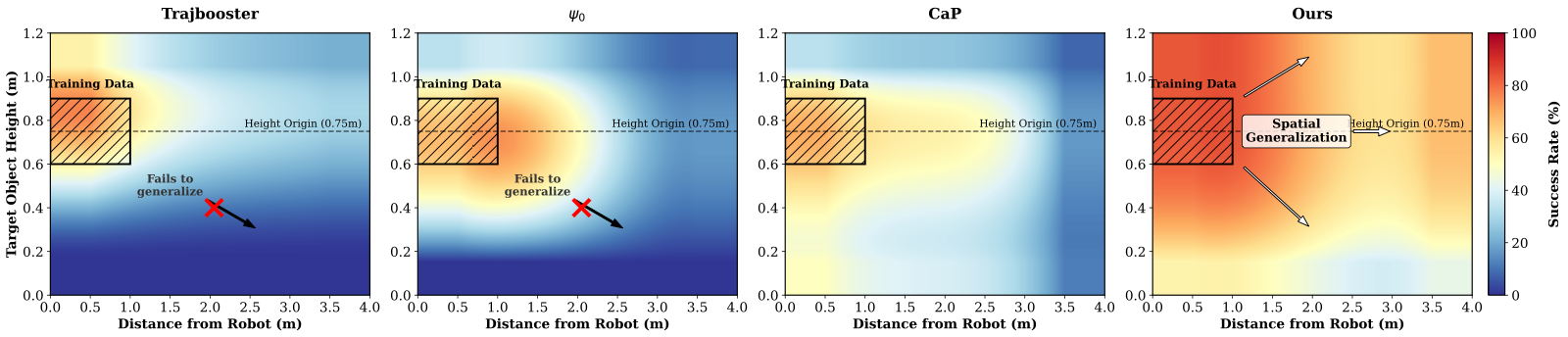
Reachability Analysis
Different Positions and Heights
The four videos below demonstrate operations under different object positions and heights. The heatmap underneath compares reachability across different methods.
02
Long-Horizon Task
Long-Horizon
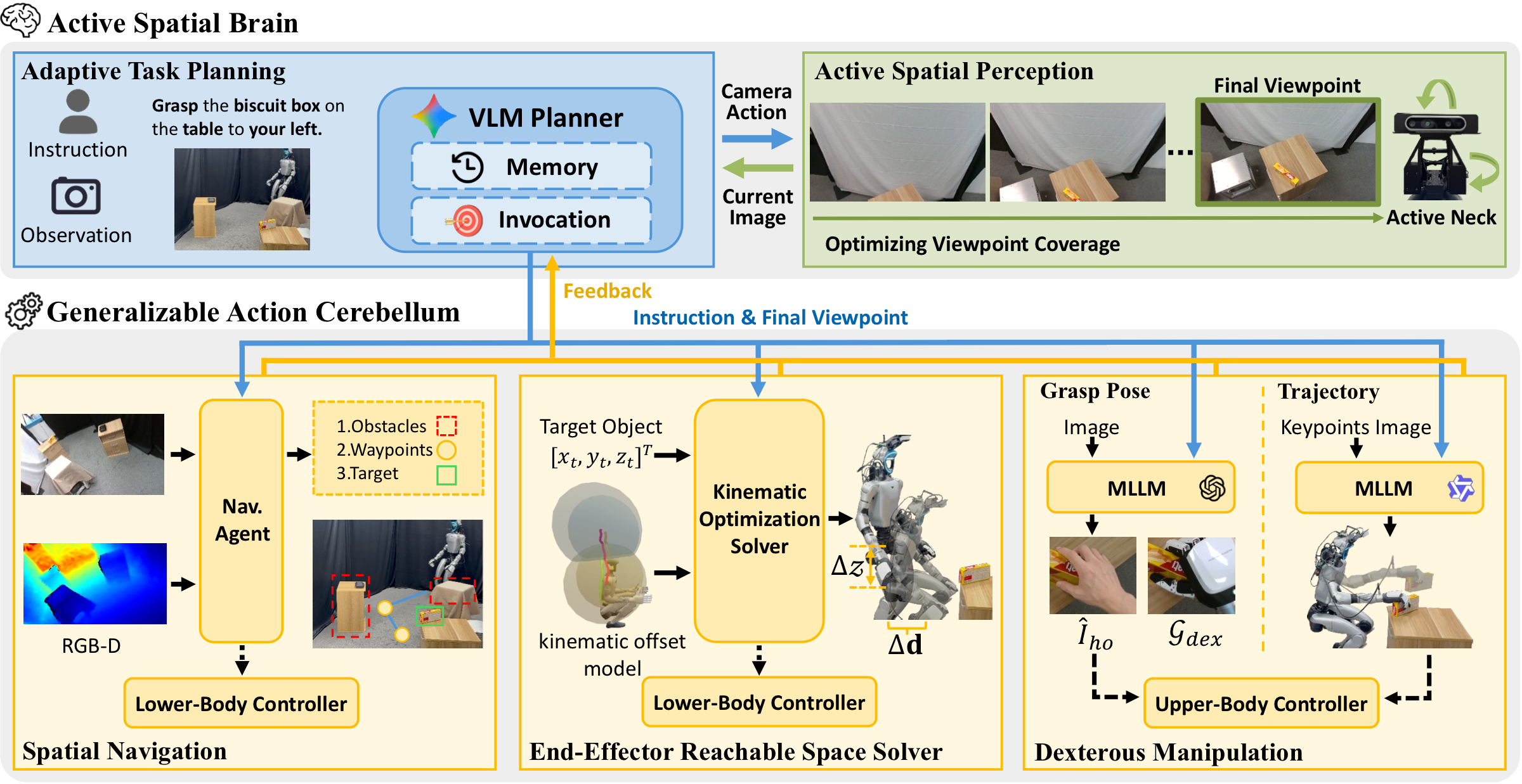
This long-horizon task demonstrates how the system can autonomously plan, invoke active visual perception, and execute manipulation actions to complete user-provided instructions that contain multiple subtasks.
03
Planning
Adaptive Planning
The planner leverages execution feedback to enable closed-loop control.
Adaptive Planning
04
Trajectory Generation
Action Primitives
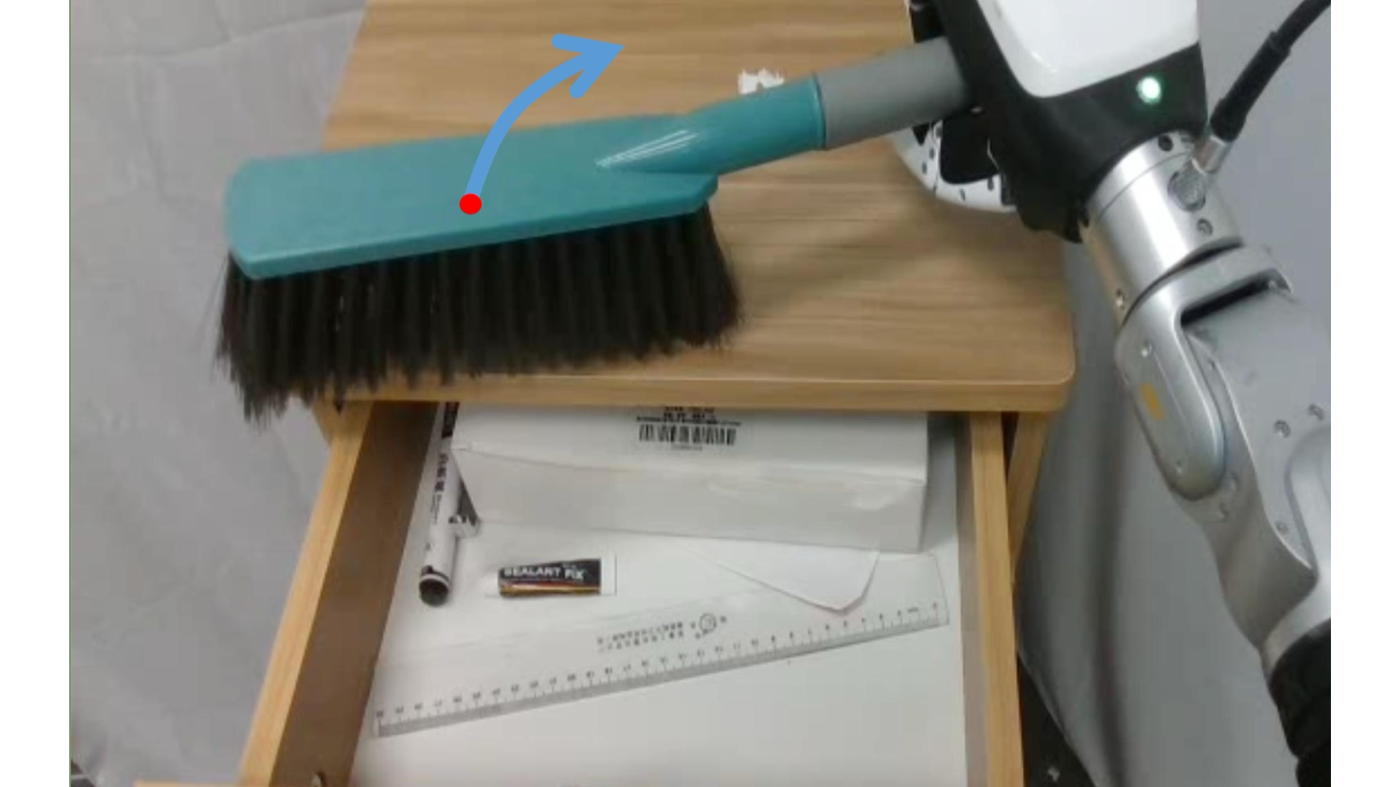
Action primitives are incorporated to generate executable manipulation trajectories.
Action Primitives

Push
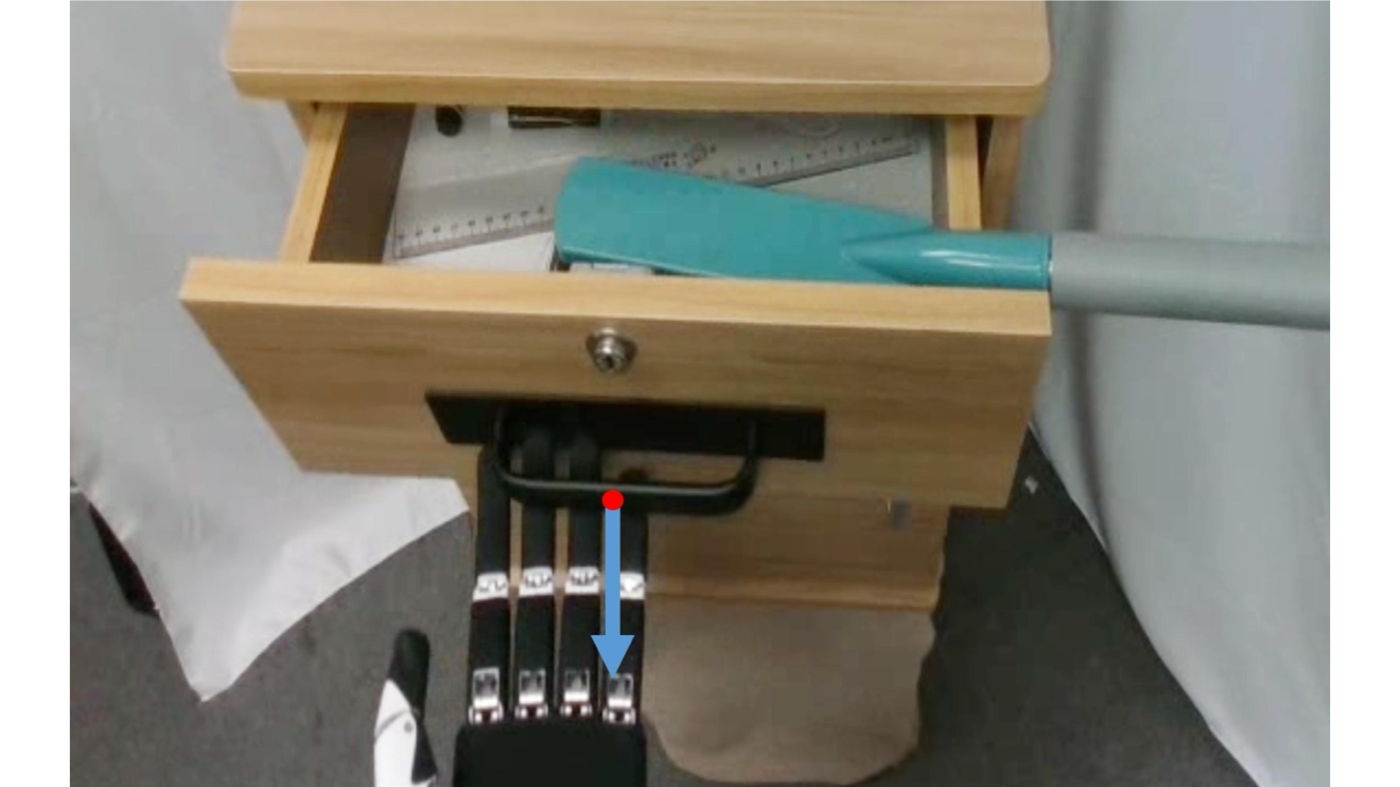
Pull

Place
Rotate
05
Spatial Understanding
Two Spatial Understanding Tasks
The two tasks below demonstrate obstacle avoidance and active exploration for spatial understanding.